This research centers on the ground-up design of a miniature aquatic vehicle that propels itself in a fish-like manner, through lateral oscillations of a flexible caudal fin. The system is driven by two high-deflection piezoelectric actuators, each consisting of a curved metallic cantilevered beam coated on one side with a piezoelectric material. Piezoelectric materials expand and contract when subjected to an electric field. Since the piezoelectric layer is located entirely to one side of the neutral axis of the composite piezoelectric material / beam structure, longitudinal expansion or contraction of the layer induces bending in the structure. Thus, if the actuator is subjected to a sinusoidally varying electric field, the free end of the actuator will deflect accordingly. Two of these actuators are positioned such that their concave surfaces are facing each other (see Fig. 1). A kinematically designed mechanism is placed between the two free ends of the actuators to translate the motion of the actuators into the motion of a caudal fin.
Figure 1. Conceptual kinematic design (The fin is rigidly connected to link 2)
Photographs of the vehicle prototypes are shown in Fig. 2, and a QuickTime movie of the vehicle in operation may be downloaded below. The movie shows the vehicle swimming a straight line, but at this stage in the project, steering control has been realized. To execute a turn, a DC voltage is applied to one actuator while the other is given its usual sinusoidal signal. The DC signal serves to adjust the average position about which the fin vibrates, causing the vehicle to turn (see Fig. 3). Currently the design permits travel on the water's surface only, but future research will yield a submersible vehicle.

Figure 2a. Photograph of the 1st Prototype.
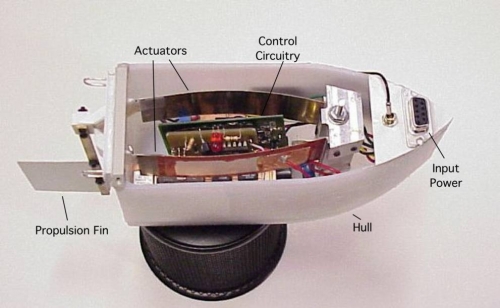
Figure 2b. Photograph of the 2nd Prototype.
Power is currently delivered to the actuators over a tether from a signal generator. In the near future, however, all power and controls will be internalized. The control signals, generated either by remote control or by an onboard PIC microprocessor, direct the output of a single-chip function generator. A push-pull amplifier then amplifies the signal, which is sent on to power the actuators. A much more efficient power supply is also being examined that takes advantage of the fact that these actuators behave electronically as capacitors. AAA batteries are used to charge a capacitor through a switching step-up circuit. When the capacitor is charged, the charge is dumped into the actuator, causing it to deflect.At the end of its stroke, the actuator dumps its charge back into the capacitor, along with some additional charge built up by straining the piezoelectric material. The result is a highly efficient power supply for these actuators.
Following work on the onboard controls and power, the goal is to place a miniature camera or other sensory equipment onboard, along with a miniature navigation system. In addition, several of these vehicles will be constructed in hopes of giving them a certain degree of intercommunication. This will permit studies in distributed control and swarm dynamics. The overall result will be a school of small, efficient, disposable aquatic spies that have a low metal content and few moving parts.
Click here to download this movie
Figure 4. Quicktime Movie of Device in Action