For this application of MR dampers we have the master (steering wheel) in the real world, while the slave (vehicle) is in a virtual reality environment. The steering wheel has an encoder measuring the steering wheel angle. For the sake of redundancy, another revolving digital sensor could be used. The MR damper will be connected to the steering wheel shaft to give some feedback to the driver. By applying a current to the MR damper, it is possible to generate a resistance torque when the driver rotates the steering wheel. The torque is dependent on the steering wheel angle or the difference between the steering wheel angle and the angle of vehicle wheels. There should also be a speed dependent behavior, restricting the turning angle at high speed. There is an encoder on steering wheel shaft to measure the angle of rotation.
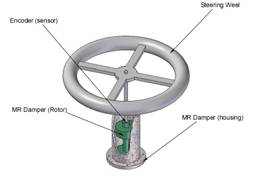
Figure 1: Steer by wire system
The damper is used in a Logitech![]() WingMan steering wheel game controller. The device has a built in force feedback system that is derived by a DC motor. This motor is removed and replaced by the MR damper. The most important advantage of doing this is replacing an active actuator with a semi-active damper which results in system stability. The control strategy that is used for driving the DC motor sometimes makes the system unstable. On the other hand the semi active MR damper will never cause instability because it never adds energy to the o verall system it just removes it.
WingMan steering wheel game controller. The device has a built in force feedback system that is derived by a DC motor. This motor is removed and replaced by the MR damper. The most important advantage of doing this is replacing an active actuator with a semi-active damper which results in system stability. The control strategy that is used for driving the DC motor sometimes makes the system unstable. On the other hand the semi active MR damper will never cause instability because it never adds energy to the o verall system it just removes it.
The steering wheel rotation angle, the accelerator, and brake are sensed by the built in encoder and potentiometers. As the user rotates the steering wheel the angle of rotation is sensed by an encoder and a signal is sent to the computer through a USB port. As the wheels of the car hit obstacles in virtual reality environment a proportional current is sent back to the MR damper which causes resistant torque sensed by the user. If the user now reverses the direction of the steering wheel there is no way of replicating the restoring force that the wheels encountered due to the stiffness of the depressed obstacle. In fact when one increases the current to the MR damper of the steering wheel during this movement the device will slow down or stop giving the user a “sticking like” sensation called the “sticky wall” phenomenon. To solve this problem two remedies have been studied: restoring linear springs to bring the steering wheel back to its original position and a torque sensor on the shaft. As soon as the torque changes direction or actually changes sign then the MR damper gets deactivated.
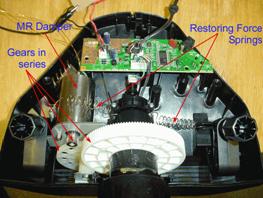
Figure 2: Modified MR fluid-based steer by wire system
Virtual reality environment for steer-by-wire
A Graphical User Interface (GUI) has been developed for controlling the steer-by-wire device. The code is developed in Visual Basic and Visual .Net. The damper is activated when the car is very close to the curbs. The code used the DirectX for graphical and I/O communications with the device through a USB post. Microsoft® DirectX® is a set of low-level application programming interfaces (APIs) for creating games and other high-performance multimedia applications. It includes support for two-dimensional (2-D) and three-dimensional (3-D) graphics, sound effects, music, input devices, and networked applications such as multiplayer games. The end user controls the car in virtual reality using the steering wheel, brake, and accelerator in real world.
 |
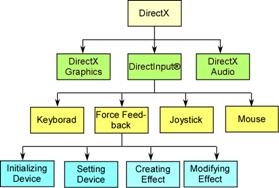 |
Figure 3: Virtual Reality Environment to Simulate Steer-by-Wire System
Among all the MR fluid samples, the one that generates acceptable large shear stress in on-state mode while maintaining a very low off-state shear stress is used for saturating the sponge based MR damper used in this study. A sponge is an effective way to prevent MR fluid leakage while not providing excessive friction caused by sealing. By applying a current of 0.75 Amps the damper generates the requited r5esistant torque. The steering wheel is used to steer the car in virtual reality world. As the car gets close to the curbs a voltage signal is computed by the controller and is sent to damper to energize the MR fluid and subsequently the steering wheel gets stiff and does not let he driver to rotate the wheel in that direction anymore. Two linear springs are used to generate the restoring force to bring the steering wheel back to its original position. Also to solve the sticky wall phenomenon the driver can easily press one of the buttons on the wheel to deactivate the MR dampers. A torque sensor can also be placed on the steering wheel to solve this problem.